Robot-ID.Com, Robot pengikut cahaya yang akan kita buat ini adalah robot dengan rangkaian analog, jadi robot ini hanya menggunakan komponen dasar elektronika seperti IC, Resistor, Kapasitor, Transistor, dan komponen pasif lainya.
Robot yang sederhana ini dapat kita buat sendiri PCB-nya, jika anda belum punya rangkaiannya silahkan lihat artikel saya sebelumnya Membuat Robot Laron, disitu ada gambar rangkaianya dan layout PCB yang tinggal print saja. Berikut ini gambar tampilan robot yang sudah jadi.
Butuh Aplikasi android tentang Robot Light Follower Analog, Instal aja langsung DISINI atau klik DOWNLOAD APLIKASI

Robot Light Following

Robot Light Following tampak depan
Untuk mencetak PCB kita bisa menggunakan teknik setrika, caranya yaitu dengan mengeprint layout pcb dengan selembar kertas foto 120 gram atau dengan kertas transfer pcb, kemudian digunting sesuai dengan ukuran desain, jangan lupa untuk printernya usahakan yang merk canon lbp600 karena recomended banget hasilnya.
Untuk hasil print-nya bisa dilihat dibawah ini :

Hasil print dengan kertas transfer
Daftar komponennya :
R1= 10K
R2= 330
R3= 330
R4= 20-50K/Trimpot
R5= 10K
R6= 330
R7= 330
R8= 20-50K/Trimpot
Q1-Q2= BC548 Transistor
T2-T3= D400 TRansistor
IC1A-IC1B = LM324
D1-D2 = Photodioda
LED1-LED2 = Lampu LED Merah
Motor DC 3Volt = 2 unit
(bisa menggunakan dynamo mainan/ mobilan anak-anak yang berbatere 2 unit AA)
Tempat Batere isi 3 = 1 unit

Komponen yang digunakan

Hasil cetak PCB dan Komponen yang sudah dipasang
Untuk roda dan chasisnya saya menggunakan motor mainan anak-anak yang kita potong dan dibuat dua unit untuk roda kiri dan kanan.

Motor dc dan bentuk chasis robot
Untuk video hasil jadinya bisa dilihat dibawah ini :
Camera 1 :
Camera 2 :
sumber: http://www.robot-id.com/2014/09/cara-membuat-robot-light-following-simple-dan-mudah.html
2. Cara Membuat Robot Laron (Light Following Robot)
Robot-ID.com, Mengapa robot Laron? apa hubungannya dengan robot yang akan kita buat? mungkin itu pertanyaan yang muncul dibenak anda, Laron adalah hewan yang sangat menyukai cahaya, kemunculanya biasanya selagi hujan rintik-rintik pas waktu maghrib, hewan ini mencari sumber-sumber cahaya seperti lampu jalan, lampu di ruangan rumah sampai lampu mobil dan motor yang menyala dijalan raya.
Konsep robot yang akan dibuat kali ini adalah robot laron yaitu robot pengikut cahaya dimana jika ada cahaya yang lebih dibanding cahaya ruangan maka robot akan mengikuti kemana arah cahaya itu atau prinsipnya Light Following Robot.
Seperti yang saya baca pada buku Robot BEAM karya mas Taufiq Dwi Septian Suyadhi yang mengulas robot laron sangat mudah sekali untuk dipraktekan hanya membutuhkan dua buah motor dc, tempat baterai, dan dua buah sensor cahaya menggunakan photodioda. Jika anda berminat untuk mempelajari robot ini secara full bisa beli bukunya disini.
Butuh Aplikasi android tentang Robot Light Follower Analog, Instal aja langsung DISINI atau klik DOWNLOAD APLIKASI

Robot Laron
Untuk gambar skemanya bisa dilihat dibawah ini :

Skema robot laron
Untuk membuatnya saya lampirkan pula desain PCB-nya :

PCB Robot laron tampak bawah

PCB Robot laron tampak atas
Wah mudah sekali bukan, saya berharap anda mencobanya dan bisa mengaplikasikan robot ini dengan baik, untuk melihat aksi robot laron bisa anda lihat dalam video dibawah ini :
sumber: http://www.robot-id.com/2014/04/cara-membuat-robot-laron-light.html
3. Cara Membuat Robot Sederhana dengan Peralatan Sehari‐hari
Robot kecil ini akan menambah koleksi keren yang bisa kamu pamerkan ke teman-teman! Petunjuk berikut ini memberi tahu cara membuat robot kecil yang bisa menyalakan matanya, sekadar untuk pameran yang murah dan menyenangkan.
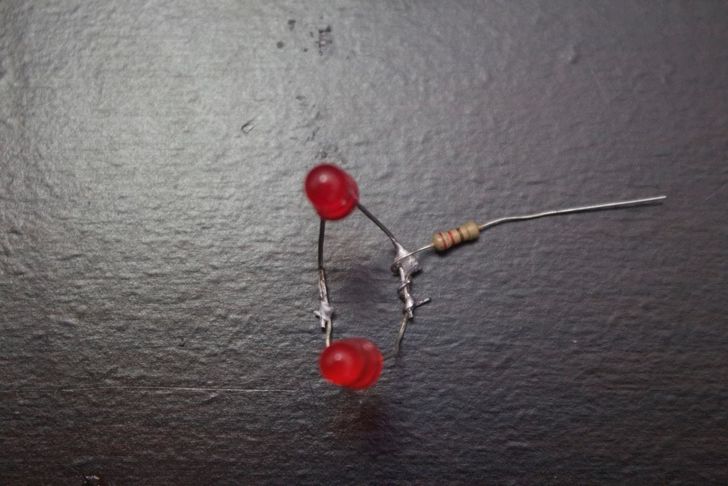
1. Siapkan dua lampu LED dan selongsong kabel bakar-susut. Kedua lampu ini akan membentuk mata robot. Siapkan selongsong kabel bakar-susut untuk menambahkan warna. Kamu butuh maksimal selongsong sepanjang 13 cm untuk proyek ini.

2. Guntinglah selongsong. Potonglah dua potong kecil selongsong, masing-masing sepanjang sekitar 1 cm. Potongan ini harus cukup kecil sehingga kaki LED akan mencuat setelah dimasukkan ke dalam selongsong.

3. Masukkan LED ke dalam selongsong. Jika kamu menggunakan selongsong, dorong LED sampai ujung lampu keluar. Ulangi proses ini untuk LED kedua.

4. Susutkan selongsong dengan besi patri. Nyalakan besi patri dan dekatkan pada lampu LED dan selongsong. Panas dari besi akan menyusutkan selongsong. Pegang LED dengan tang untuk melindungi jari dari panas.

5. Pilih wadah baterai. Dapatkan wadah baterai yang berdaya sekitar 3 volt. Wadah ini akan menampung dua baterai AA.

6. Patrilah LED dan resistor pada wadah baterai. Ambil beberapa kabel insulasi dengan ujung terkelupas. Patrilah semua komponen ini dengan cara sebagai berikut:
Patri kabel negatif (hitam) dari wadah baterai ke terminal pendek dari lampu LED.
Ambil resistor 100 ohm (atau resistor yang nilainya mendekati nilai ini). Tanpa resistor, lampu akan mati.
- Patri salah satu kaki resistor ke kabel positif baterai.
- Patri kaki resistor lainnya ke terminal positif LED.
- Hubungkan kedua kaki positif dari kedua LED.
- Hubungkan kedua kaki negatif dari kedua LED.

7. Bengkokkan empat penjepit kertas menjadi kaki. Potonglah penjepit kertas begitu rupa sehingga terlihat seperti kaki robot.


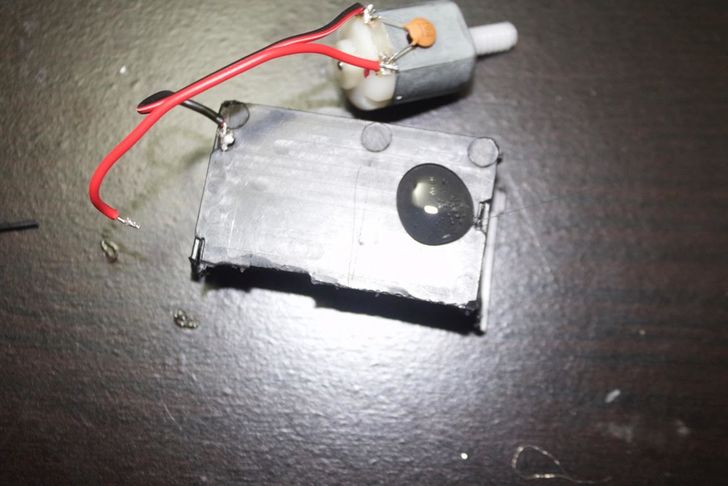
8. Patri kabel motor pada dudukan baterai. Patri kabel motor yang bergetar ke kabel positif dan negatif dari dudukan baterai.

9. Rekatkan motor pada dudukan baterai dengan lem panas. Rekatkan motor di atas dudukan baterai dengan lem panas. Pasanglah kabel dudukan baterai pada kaki motor.

10. Selesaikan robot. Topang robot dengan kaki-kaki dari penjepit kertas. Masukkan baterai dan perhatikan robot kecil menyala dan bergerak. Letakkan di atas permukaan rata dan lembut agar tidak terguling.

Tips
- Demi keselamatan, pakailah kacamata pengaman dan gunakan fume extractor saat mematri.
- Tambahkan beberapa selongsong pada kaki-kaki untuk membuatnya semakin bergaya.
- Mintalah bantuan orang dewasa jika ada beberapa hal yang tidak dapat kamu lakukan sendiri.
Peringatan
- Berhati-hatilah saat menggunakan lem tembak dan besi patri.
Hal yang Anda Butuhkan
- 2 kristal LED
- 4 penjepit kertas jumbo
- Besi patri
- 2 baterai AA
- Dudukan baterai
- Pager motor (motor kecil bergetar yang ditemukan pada ponsel)
- Resistor 100 Ω
sumber: https://id.wikihow.com/Membuat-Robot-Sederhana-dengan-Peralatan-Sehari‐hari
4. Cara Membuat Robot Sederhana
Ada berbagai cara untuk membuat robot, mulai dari yang rumit dan memerlukan banyak waktu sampai yang mudah dan sederhana. Contohnya, Anda dapat membuat robot pemula yang bergerak menggunakan motor mainan, baterai 9V, koin logam, dan wadah plastik kecil. Meskipun robot jenis ini tidak dapat melakukan hal-hal yang mengesankan, Anda dapat mengikuti langkah-langkah di bawah untuk mempelajari dasar-dasar ilmu robotik.
Langkah
1. Persiapkan barang-barang yang tertera di bawah.

2. Buatlah lubang pada kotak Tupperware menggunakan pisau. Lubang ini akan berfungsi sebagai dudukan motor.

3. Belilah motor seperti yang ada di gambar dari toko mainan. Motor yang dibeli harus memiliki bagian logam yang terlihat dan dapat disambungkan dengan cara dilas. Mintalah jenis motor yang dapat dilas dan dimodifikasi ketika berbelanja di toko mainan.
4. Sambungkan satu kabel pada sisi kanan motor. Pastikan ujung logam kabel sudah terhubung dengan logam pada motor.
5. Sambungkan ujung kabel lainnya pada sisi kiri baterai. Pastikan kembali bahwa logam pada ujung kabel sudah menempel pada motor.
6. Tempelkan uang logam yang Anda siapkan pada batang motor menggunakan lem tembak.

7. Laslah ujung kabel positif (merah) yang terhubung dengan motor pada sakelar berjenis non-momentary. Sakelar pada gambar adalah sakelar jenis SPST (Single Pole Single Throw). Sakelar jenis ini tidak perlu terus ditekan agar listrik dapat terus mengalir. Anda hanya perlu menekan tombolnya satu kali dan listrik akan terus mengalir sampai Anda mematikannya.
- Jangan lupa untuk memastikan ujung logam kabel sudah terhubung dengan logam penghantar pada sakelar.
8. Gunakan lem untuk menempelkan motor pada lubang dudukan yang sebelumnya dibuat. Tempelkan pula apa pun yang ingin Anda tempelkan pada robot Anda.

9. Gunakan kabel baru untuk menyambungkan baterai dengan robot Anda. Laslah ujung kabel merah pada kutub positif baterai dan kabel negatif (hitam) pada kutub negatif baterai.
10. Sambungkan ujung kabel positif (merah) yang terhubung dengan baterai pada pin yang terletak pada tengah sakelar. Pastikan ujung logam sudah menyentuh logam penghantar yang terletak pada bagian tengah sakelar sebelum dilas.
- Langkah ini diperlukan agar listrik mengalir melewati sakelar sebelum dapat digunakan oleh motor.
11. Sambungkan ujung kabel negatif (hitam) yang terhubung dengan baterai dengan ujung kabel negatif yang terhubung dengan motor. Dengan ini baterai akan mulai mengalirkan arus listrik ke dalam rangkaian yang Anda buat.
- Hubungkan ujung positif dan negatif yang terhubung pada tempat baterai dan motor jika Anda tidak menggunakan lampu LED.
- Lampu LED akan rusak jika dihubungkan secara langsung dengan baterai. Jika Anda ingin menambahkan lampu LED, gunakan resistor 350ohm pada ujung positif lampu dan hubungkan ujung positif lampu pada ujung positif baterai.
12. Gunakan lem tembak untuk menempelkan tutup Tupperware dengan kotak karton kecil.

13. Letakkan Tupperware di atas tutup yang sudah ditempelkan pada kotak karton. Anda dapat menyembunyikan baterai di dalam kotak karton dan robot Anda pun siap digunakan!

Tips
- Gunakan koin yang berukuran tidak terlalu besar.
Peringatan
- Berhati-hatilah ketika menggunakan lem tembak. Alat ini juga tidak boleh dibiarkan menyala terlalu lama.
Hal yang Anda Butuhkan
- Lem tembak
- Kotak atau wadah kecil
- Wadah Tupperware kecil
- Uang koin
- Baterai 9V
- Motor mainan
sumber: https://id.wikihow.com/Membuat-Robot-Sederhana
5. Beginilah Cara Membuat Robot Sederhana dan Murah Bagi Pemula
Oleh Asep Setiawan

Siapa yang suka robot? Sobat roboters yang mulai suka dengan dunia robotik mungkin masih sering bingung bagaimana memulai cara membuat sebuah robot, meskipun yang masih sederhana yang penting ada ilmu dan pengalamannya.
Robot yaitu mesin yang bentuknya mirip makhluk hidup. Untuk membuatnya, dibutuhkan teknologi yang canggih dan juga program yang cukup rumit untuk robot bisa bergerak bahkan berpikir dan bertingkah laku selayaknya makhluk hidup aslinya.
Kabar baiknya, ternyata ada juga robot yang mudah untuk dibuat seperti BrushBot. BrushBot yaitu robot yang bisa bergerak karena getaran motor. Gerakannya sangat menarik, merayap kesana kemari seperti kecoa.
Walaupun demikian, robot ini tidak hanya dapat digunakan untuk menakuti-nakuti orang. Robot ini juga bisa diadu! Sekarang ini sudah banyak kompetisi BrushBot di seluruh dunia. Lalu bagaimana cara membuatnya? Simak post berikut ini.
Cara Membuat Robot Brushbot yang Sederhana dan Murah
Nah, kali ini kita akan menjelaskan mengenai bagaimana cara membuat robot sederhana dan murah serta tanpa program untuk pemula yang hanya membutuhkan waktu 5 menit saja, tidak percaya?
Ayo kita buktikan kebenarannya. Ikuti setiap langkah-langkah berikut ini dengan benar supaya hasil robotnya bekerja dengan baik.
Bahan dan Alat Membuat Robot

scienceatelier.wordpress.com
-Motor DC yang kecil untuk vibrator HP
-Sikat kecil (bisa dari sikat gigi yang dipotong)
-Baterai kancing, AAA, AAAA ataupun baterai arloji (1.5 V)
-Blu-tack ataupun cellotape
-Gunting dan kabel (jika motornya tidak berkabel)
Langkah-langkah Cara Membuat Robot
1. Langkah pertama, periksa motor. bila motor yang kamu punya tidak berkabel, pasang kabel pada tempatnya (biasanya berbentuk 2 plat logam kecil). Disarankan kabel tersebut disolder supaya kencang, tapi dapat juga ditempel dengan blu-tack atau cellotape.

scienceatelier.wordpress.com
2. Setelah motor telah mempunyai kabel, tempelkan motor di sikat dengan blu-tack. Dan jangan lupa, ujung kabelnya harus keluar.
3. Langkah selanjutnya, tempelkan juga baterai di sikat dengan memakai blu-tack. Atur supaya kabel dapat mencapai kedua kutub dari baterai.

scienceatelier.wordpress.com
4. Setelah itu, hubungkan kabel motor dengan baterai. Pastikan kabel-kabelnya terhubung dengan masing-masing kutub yang tepat. Motor dan sikat tersebut akan bergetar.

scienceatelier.wordpress.com
Letakkan robot di lantai atau meja. Robot kamu akan berjalan-jalan!
Gerakan robot dipengaruhi oleh beberapa hal, seperti posisi baterai, panjang serta arah sikat, dan sebagainya. Atur-atur sepaya robot bisa bergerak seperti yang kamu inginkan. Kadang, bagian dari bulu sikat juga perlu dipotong. Hiasi juga robot kamu agar semakin garang ketika diadu.
Selamat bermain BrushBot-mu!
sumber: https://cara.pro/cara-membuat-robot-sederhana-dan-murah-bagi-pemula/
6. Cara Membuat Robot Sederhana Bagi Pemula

Bagi sebagian orang, belajar elektronika sangat menyenangkan. Karena dengan ilmu elektronika, kita bisa membuat berbagai macam robot yang menarik. Ada banyak sekali jenis robot yang dapat dibuat jika kita memiliki ilmu elektronika, mulai dari robot sederhana sampai yang canggih.
Bagi para pemula, mungkin membuat robot sederhana bukan suatu hal yang sulit. Karena bahan dan rangkaiannya juga simpel. Salah satu jenis robot yang biasa dibuat untuk para pemulai adalah robot line follower atau robot line following. Prinsip kerja dari robot tersebut akan berjalan mengikut garis yang telah dibuat.
Robot ini menggunakan sensor cahaya berupa photo dioda. Sensor tersebut berperan sebagai pengenal garis gelap dan terang yang merupakan jalur dari robot itu sendiri. Robot line follower juga dapat dikembangkan menjadi lebih canggih lagi seperti robot pemadam kebakaran dan robot-robot lainnya.
Rangkaian Robot Line Follower Sederhana
Berikut ini adalah skema rangkaian robot sederhana line follower yang bisa anda tiru dan terapkan. Rangkaian ini cukup sederhana dan pastinya anda bisa membuatnya sendiri di rumah, tak peduli pemula ataupun yang sudah mahir. Penasaran? Langsung saja simak ulasan belajarelektronika.net berikut ini.

Rangkaian robot sederhana ini menggunakan beberapa komponen elektronika dasar seperti LED, transistor, resistor, dan dua motor DC sebagai outputnya. LED digunakan sebagai sumber cahaya yang kemudian dipantulkan pada jalur robot. Kemudian pantulan tersebut diterima oleh photo dioda dan diteruskan ke transistor.
Besar kecilnya pantulan cahaya yang diterima oleh photo dioda tersebut akan mempengaruhi gerak dari motor DC yang menjadi penggerak utama dari robot line follower. Sensitifitas dari motor DC dapat diatur menggunakan variabel resistor yang terpasang dalam rangkaian.

Demikian sedikit informasi mengenai cara membuat robot sederhana bagi pemula. Semoga informasi tadi dapat memberikan manfaat dan juga inspirasi bagi para pembaca setia belajarelektronika.net. Sampai jumpa di ulasan yang tak kalah menarik lainnya. Dan bagikan artikel ini kepada teman-teman anda bila bermanfaat.
sumber: http://belajarelektronika.net/cara-membuat-robot-sederhana-bagi-pemula/
7. CARA MEMBUAT ROBOT SEDERHANA
Okel langsung saja, bahan dan alat-alat yang perlu dipersiapkan adalah: 1.
- Tempat Battre ukuran 2 battre (Battre Holder) 1 buah 2.
- SPDT Switch/Micro Switch 2 buahKlip kertas secukupnya 3.
- Konektor terminal kabel (bisa juga tidak menggunakannya) 4.
- Dinamo (motor ) mainan 2 buah, bisa kita dapatkan dari mainan yang rusak seperti mini 4WD (tamiya). Tapi dengan catatan dinamotor tersebut masih berfungsi/berputar/tidak rusak.
Langkah Pertama:
- Letakan kedua SPDT Switch di atas tempat battre, kemudian dilem menggunakan lem power (1).
- Setelah itu kaki SPDT Switch paling atas kedua-duanya saling menyentuh kemudian kita solder.
- Berikutnya kaki tengah kedua-duanya kita sambung dengan kawat lalu di solder.
- Tempelkan kedua dinamo pada samping tempat battre menggunakan lem power atau lem bakar, menempelkannya agak miring.

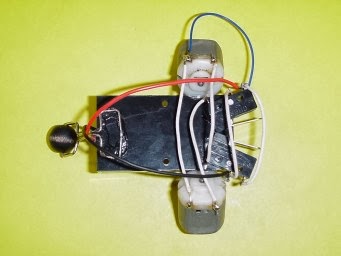
Langkah Kedua:
Hubungkan kaki paling bawah SPDT Switch kiri dengan kaki dinamo bagian kiri, begitu juga dengan bagian kanan dengan menggunakan kawat lalu disolder:
- Setelah itu hubungkan kaki dinamo bagian kiri dengan kaki dinamo bagian kanan menggunakan kabel

Langkah Ketiga:
Sambungkan kabel dari dinamo kebagian belakang tempat battre dengan cara di solder, jangan terlalu lama menyoldernya karena akan mengakibatkan plastik tempat battre meleleh, lakukan dengan cepat
- Setelah itu sambungkan kabel merah tempat battre ke kaki atas SPDT Switch dan kabel hitam tempat battre ke kaki tengah SPDT Switch dengan cara di solder
Lihat gambar berikut:

Langkah Keempat:
Buat roda bagian belakang dengan menggunakan klip caranya klip diluruskan kemudian dilipat menggunakan tang dan masukan klip tersebut kedalam lubang butiran kemudian tempelkan dibagian belakang tempat battre dengan menggunakan lem. Lihat gambar:

Langkah Kelima:
Buat antena dengan menggunakan klip kertas, caranya klip tersebut kita luruskan dengan tang, setelah lurus kita lengkungkan perlahan-lahan. Setelah itu kita masukan klip yang sudah dilengkungkan kedalam konektor terminal jepit dengan tang agar kencang
- Masukan kedalam besi SPDT Switch
- Bisa juga tidak memakai konektor terminal langsung di lem klip kertasnya ke SPDT menggunakan lem power
Lihat gambar berikut:

Langkah ke enam:
Buat badan robot dengan menggunakan tutup botol plastik, bisa di cat tutup botol plastik tersebut sesuai dengan warnanya (misalkan kumbang). Lihat gambar berikut ini:

Langkah Ketujuh:
Selesai.
sumber: https://www.academia.edu/7366537/CARA_MEMBUAT_ROBOT_SEDERHANA
8. Cara Membuat Robot Sederhana dari Mainan Mobil Bekas
CARA MEMBUAT ROBOT – Anehnya, awal perkembangan dari cara membuat robot di dunia berasal dari ilmuwan biologi dan pengarang cerita novel pada sekitar abad XVIII, bukan berasal dari ilmu elektronika itu sendiri.
Saat itu, beberapa pakar dari para ilmuwan biologi ingin menciptakan sebuah makhluk yang bisa menuruti apa saja yang mereka inginkan dan perintahkan. Sayangnya, impian tersebut belum bisa terwujud menjadi nyata melainkan hanya menjadi bahan cerita novel maupun naskah sandiwara panggung.
Baru sekitar abad XIX para insinyur teknik mulai mengembangkan sebuah robot mainan berbentuk boneka. berbekal keahlian pembuatan jam mekanik, para insinyur mencoba membuat sebuah boneka tiruan layaknya manusia yang bisa bergerak pada bagian tubuhnya.

world.honda.com
Singkat cerita, robot-robot cerdas mulai berkembang pesat seiring dengan canggihnya komputer di sekitaran tahun 1950-an. Seiring dengan semakin cepatnya kemampuan komputasi komputer dan fisiknya yang mengecil, beberapa robot yang dibuat pun ikut semakin cerdas. Khususnya dalam membantu pekerjaan-pekerjaan tertentu yang sulit dilakukan oleh manusia.
Sekilas Tentang Robot Avoider
Bagi kamu yang mulai menyukai dengan dunia robotik, mungkin masih bingung tentang bagaimana cara membuat robot sederhana. Misal contoh dari robot paling sederhana yakni robot avoider atau biasa desebut dengan robot halang rintang.
Robot avoider akan bekerja dengan memanfaatkan sensor (limit switch) yang dipasang pada bagian depan robot tersebut. Apabila sensor tersebut menyentuh dinding atau mengenai benda lain, maka motor akan berputar menurut keadaan jalurnya misal, belok ke kiri atau ke kanan bahkan mundur jika kedua limit switch sama-sama menyentuh dinding.
Nah, dalam artikel kali ini saya akan membuat tutorial cara membuat robot sederhana tanpa PCB dengan memanfaatkan barang bekas seperti mainan. Bagi para pemula, tutorial ini bisa kamu pelajari asalkan sesuai dengan prosedur langkah-langkah yang sudah saya rangkum di bawah ini.
Cara Membuat Robot Sederhana dari Mainan Bekas
Siapkan terlebih dahulu mainan mobil-mobilan bekas yang masih utuh pada bagian motor dan rodanya. Untuk pembuatan body, cara alternatifnya adalah dengan menggunakan triplek atau airlyc jika mempunyai modal banyak.
Berikut ini salah satu contoh mobil mainan yang digunakan pada tutorial ini.

Gambar Rangkaian PCB Robot Mainan Bekas Sederhana
Sampel gambar skema tutebot

robot.id
Untuk rangkaian PCB, penyusunan pada tiap kompinen harus rapi. Selanjutnya, buat rangkaian tersebut menjadi 2 kali untuk motor sebelah kiri dan kanan seperti yang tertera pada gambar di bawah ini.

Berikut ini rangkaian PCB dengan menggunakan software diptrace tampak dari atas dan bawah.

Tampak dari atas | robot-id.com

Tampak dari bawah | robot-id.com
Daftar Komponen Utama Pembuatan Robot Sederhana
- Triplek atau acrylic berukuran 20×20 cm
- Mobilan bekas sebanyak 2 unit, dibutuhkan 2 mobil mainan untuk satu robot
- Relay 5 volt 8 pin sebanyak 2 unit
- 2 unit Limit switch
- 1 unit IC Regulator 7805
- Transistor TIP31 sebanyak 2 unit
- Variabel resistor sebanyak 2 unit
- PCB Polos berukuran 8×5 cm
- Speser/baut sebanyak 4 unit
- Header pin berwarna hitam
- Resistor beserta kapasitor
- Kabel, timah, batere 3xAA atau Lippo 7,4 V
Langkah-Langkah Membuat Robot Sederhana dari Mainan Bekas
Ikuti langkah-langkah cara membuat robot ini secara berurutan.
Langkah Pertama

Bentuk body robot yang terbuat dari airlyc sudah jadi …. | robot-id.com

Siapkan PCB dan Baterai | robot-id.com
Langkah Ketiga

Robot dengan PCB dan kabel yang sudah dipasang | robot-id.com
Hasil Akhir

sumber: https://selangkahlagi.com/cara-membuat-robot/
9. Cara Membuat Robot Sederhana dengan Barang Bekas | Beetlebot
Cara membuat robot sederhana (Beetlebot) | Sudah menjadi tren di Indonesia tentang pembuatan robot, sudah banyak karya inovatif dalam bidang pembuatan robot baik di luar negeri maupun di negeri kita sendiri. Kemajuan teknologi informasi yang menjadi pemicu munculnya aneka inovasi, anak muda Indonesia pun tak mau kalah dalam pembuatan robot, dan banyak karya inovasi anak negeri yang sudah masuk ke level Internasional dan ada beberapa karya anak negeri dalam pembuatan robot yang berprestasi dalam menjuarai ajang kompetisi robot.
Apakah anda tertarik untuk mencoba membuat robot yang sederhana? Membuat robot pada umumnya membutuhkan biaya yang cukup mahal, dari biaya jutaan rupiah hingga ratusan juta yang dibutuhkan dalam proyek pembuatan robot ini. Tapi, anda tak perlu hawatir, kali ini kami ingin berbagi untuk anda tentang cara membuat robot yang sangat sederhana, anda tak perlu merogoh kocek yang banyak untuk mencoba membuat robot ini. Alat dan bahannya pun sangat mudah anda temukan di rumah. Kalau pun anda beli harga bahannya tidaklah seberapa.
Berikut gambar robot sederhana yang akan kita buat, Beetlebot

Beetlebot
Pembuatan Robot Sederhana ini bisa anda jadikan sebagai langkah awal dalam belajar membuat robot. Dengan robot sederhana ini saya yakin anda pasti bisa membuatnya di rumah msekipun tanpa bimbingan seorang guru. Seperti apa robot yang akan kita nuat? Yuk simak penjelasnnya berikut ini!
Beetlebot adalah robot sederhana yang dibuat tanpa processor,program,dan sensor.
Tanpa perlu bicara panjang lebar,mari kita lihat proses pembuatannya
Cara Membuat Robot dengan Barang Bekas | Beetlebot
Komponen robot:
- 2 buah dinamo motor 1,5 Volt (bisa diambil dari mainan mobil bekas)
- 2 buah klip penjepit kertas kecil
- 1 buah klip penjepit kertas besar
- 2 buah baterai ukuran AA
- 1 buah dudukan baterai AA
- 1 batang lem bakar
- 1 buah roda kecil (bentuknya sesuai kreasi anda)
- 1 meter kabel tunggal kecil/kabel jumper
- 2 buah saklar SPDT (saklar tape-mobil)
- Saklar power on/off
Alat-alat dalam pembuatan robot sederhana ini:
1. Solder listrik
2. Glue gun
3. Tang potong
4. Tang lancip
Cara Pembuatan Robot Sederhana Beetlebot
1. Siapkan alat dan bahan untuk membuat robot:

2. Potong kabel sekitar 10cm dan solderlah setiap kabel ke masing-masing komponen seperti gambar.

3. Ambil dudukan baterai dan sambung bagian terminal tengahnya dengan sebuah kabel.

4. Tempelkan (Lem dengan lem bakar) 2 buah saklar SPST yang telah diberi kabel ke bagian bawah dudukan baterai dengan membentuk seperti huruv V.

5. Lem juga pada dudukan baterai 2 buah motor yang telah diberi sambungan kabel pada terminalnya seperti gambar di bawah.

6. Buatlah semacam roda belakang dengan menggunakan klip kertas dan bola/roda kecil. Tempelkan lalu lem pada dudukan baterai.



7. Cara penyambungan kabel-kabelnya seperti gambar di bawah ini.

- Sambungkan kaki paling atas saklar menggunakan jumper pada kedua saklar tersebut dan solder
- Kemudian sambungkan positif battery atau kabel warna merah ke kaki saklar paling atas
- Lalu sambungkan kaki saklar yang tengah pada kedua saklar tersebut dan sambungkan negatif battery atau kabel warna hitam pada kaki tengah saklar.
- Untuk kaki paling bawah saklar sambungkan pada dinamo/motor dc seperti pada gambar di atas.
8. Buat semacam antena kumbang dari clip kertas lalu tempelkan dan lemkan pada masing-masing kedua tuas saklar SPST.

9. Selesai… Tinggal masukkan baterainya dan mainkan.


Robot ini bisa dibuat dari bahan bekas. Robot ini cocok untuk dijadikan sebagai mainan anak-anak ataupun dijual. Biaya pembuatan robot ini pun tidak terlalu mahal.
Panduan versi videonya bisa anda lihat di bawah ini!
Video ini diunggah oleh salah satu channel orang asing dengan nama channel : Make
sumber :
#http://www.slideshare.net/YadiYadi2/document1-46798669
#Channel : Make
sumber: https://wirahadie.com/cara-membuat-robot-sederhana-dengan-barang-bekas-beetlebot/
10. Cara Membuat Robot Sederhana dari Kardus
Bicara lagi tentang mainan utnuk anak, di zaman sekarang ini tentunya sangat mudah mencari mainan untuk anak dengan harga yang sangat terjangkau. Jauh lebih murah ketimbang zaman dulu sehingga membuat anak zaman dulu memilih membuat maianan mereka sendiri. Nah, agar anak-anak zaman sekarang tidak kalah kreatif dengan anak zaman dulu, bisa kamu ajari dengan Cara Membuat Robot Sederhana dari Kardus berikut ini.

Membuat Sendiri Mainan Robot Sederhana dari Kardus (Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Bahan dan Alat untuk Membuat Robot Sederhana dari Kardus
- Kardus
- Cutter
- Tusuk sate
- Stik es krim
- Motor dinamo bekas tamiya
- Karet
- Lem
Tutorial Cara Membuat Robot Sederhana dari Kardus
Untuk Membuat Robot Sederhana dari Kardus ini pertama potong kardus dengan cutter sesuai dengan pola yang telah digambar.


(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Hasilnya seperti ini.

(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Beri lubang pada titik sesuai pola. Lubang ini akan memnadi tempat sedotan sebagai laker atau bearing.

(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Buat bearing atau laker dari sedotan dengan panjang kira-kira 1cm sebanyak 6 biji.

(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Pasang potongan sedotan tadi pada lubang yang telah dibuat dan beri lem agar tidak lepas.


(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Beri lem pada ujung kardus bodi tadi dan tempelkan sisi bawah dan atas seperti pada gambar di bawah ini.

(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)


(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Buat lingkaran dengan jangka lalu potong dengan gunting. Lingkaran ini akan dijadikan puley.


(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Susun lingkaran tadi pada tusuk sate yang menjadi asnya.


(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Hasilnya seperti ini. Puley ini terdiri dari tiga lapis dengan lapisan tengah yang lebih kecil dari lapisan pinggir.

(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Saatnya merangkai. Sebelum dirangkai pasang dulu karet sebagai panbeltnya


(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Beri lem pada sisi atas dan bawah.

(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Potong sisa tusuk sate bagian tengahnya saja. Karena bagian atas dan bawah akan dihubungkan dengan kaki robot nantinya.

(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Siapkan stik es krim dan beri pola seperti gambar di bawah ini. Seta beri lubang pada titik pola.

(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Pada lubang tadi masukkan tusuk sate dengan panjang kira-kira 2cm.

(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Pasang kaki-kaki dari stik es krim tadi pada tusuk sate bodi seperti gambar di bawah ini.

(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Solder kebel dinamo pada baterai dan saklar. Mainan robot sederhana dari kardus ini menggunakan bateri bekas ponsel karena kecil dan ringan.



(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Bila dilihat dari sisi depan sebelum dipasang kaki.

(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Buat kardus dengan pola seperto garpu. Kardus ini akan menjadi kaki robot.

(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Beri tambahan kardus pada sisi seperti gambar di bawah ini. Kardus ini akan menguatkan kaki robot.

(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Pasang bagian tegaknya dan beri lem.

(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Hasilnya akan terlihat seperti gambar di bawah ini.

(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Pasang pada mekanisme kaki dari stik es krim tadi dan beri ring dari stik es krim kemudian lem.

(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Sebagai tambahan, beri mata agar lebih mirip dengan robot.

(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Robot Mainan dari Kardus ini pun sudah jadi dan siap dimainkan.

(Gambar: youtube.com/watch?v=Z7N0xCDVzIA)
Dengan Cara Membuat Robot Sederhana dari Kardus ini kamu bisa mengajarkan pada anak bahwa untuk bisa bermainan dengan mainan, bisa membuat sendiri tanpa harus perlu beli. Selain itu juga sekaligus mengola kreatifitas. Selain itu kamu juga sekaligus memperkenalkan sistem mekanisme sederhana. Sekian Tutorial Cara Membuat Robot Sederhana dari Kardus ini, semoga bermanfaat, terimakasih.
11. Cara Membuat Robot Wall-E dari Kardus Yang Bisa Bergerak
Kerajinan adalah salah satu fokus yang sudah diajarkan pada anak sejak usia dini. Banyak sekali jenis mainan yang beredar dengan tujuan merangsang ketrampilan dan kecerdasan anak. Mainan-mainan ini dikatakan mampu membuat anak lebih kreatif sehingga akan sangat baik untuk masa depan mereka.
Selain memberi mereka mainan edukasi, sebetulnya para orang tua juga bisa loh melatih anak meraka untuk membuat mainan sendiri seperti robot dari kardus. Kenapa menggunakan kardus? alasannya simpel, seperti yang telah kita ketahui, kardus adalah bahan yang paling mudah kita temui karena hampir semua barang dikemas dengan kardus.

Membuat Sendiri Robot Sederhana Wall-E dari Kardus Yang Bisa Bergerak
(Gambar: youtube.com/watch?v=ARQjPIzMrW8)
Kalau kamu masih ingat, mungkin kamu pernah memperhatikan saat ada karnaval, salah satu kostum yang banyak diperhatikan orang adalah kostum robot dari kardus untuk karnaval. Namun biasanya orang membuat robot dari kardus untuk karnaval ini dengan ukuran besar agar terlihat oleh banyak orang.
Sekarang mungkin muncul pertanyaan, kenapa robot menjadi penampilan yang paling banyak diperhatikan oleh orang? Alasannya sederhana, mungkian bagi setiap orang ketika masa kecilnya pasti pernah nonton kartun atau film robot, sehingga ketika ada orang membuat robot transformer dari kardus saat karnaval, pasti akan diperhatikan oleh banyak orang.
Kardus adalah salah satu barang bekas pakai yang paling paling mudah ditemui di rumah sekaligus paling mudah dialih fungsikan kegunannya. Misalnya saja seperti yang saya singgung di atas, saat karnaval pasti ada orang yang membuat robot dari kardus yang bisa dipakai orang dengan bentuk yang keren.
Nah, pada kesempatan kali ini, kami akan menyuguhkan tutorial cara membuat robot wall-e dari kardus yang bisa bergerak. Robot ini menggunakan remot kontrol, jadi bisa dikendalikan dari jarak jauh, keren bukan? Oke langsung simak saja tutorialnya di bawah ini.
Bahan dan Alat untuk Membuat Robot Wall-E dari Kardus Yang Bisa Bergerak
- Kardus bekas
- Cutter
- Jangka
- Motor gearbox mini 3v
- Modul repeater dan receiver remote control (bukalapak, shopee, tokopedia)
- Baterai dan tempatnya
- Karet kolor
- Serta bahan pendukung lain
Tutorial Cara Membuat Robot Wall-E dari Kardus Yang Bisa Bergerak
Pertama-tama buat bulatan dengan diamater kira-kira 3cm menggunakan cutter seperti jangka seperti ini.

Kemudian potong sesuai pola menggunakan cutter dengan hati-hati agar bentuknya tetap bulat sempurna.

Beri lem tembak pada roda kardus tadi, dan tempelkan roda lain sehingga lebih tebal.


Beri lubang tepat ditengahnya menggunakan bor atau paku.

Buat sebanyak enah buat roda kardus seperti ini.

Karena yang akan kita buat adalah robot kardus wall-e, maka kita perlu membuat kaki yang serupa dengan tank, caranya siapkan kardus bentuk segitiga dengan ujung melunak seperti ini. Pasang stik es krim pada bagian bawah agar lebih kakinya lebih kuat.

Segitiga ini akan terlihat dari sisi luar, dari sisi dalam beri lem kemudian tempelkan kardus persegi seperti ini. Kardus persegi ini nantinya akan berfungsi sebagai badan robot wall-e.


Siapkan motor dinamo gearbox dan beri isi pulpen sebagai as-nya.

Masukkan pada segitiga bagian atas tadi.

Pasang roda pada as seperti ini.

Sekarang buat rantai tanknya menggunakan karet kolor yang diberi potongan lidi sebagai giginya seperti ini.

Pasang rantai tank tadi pada roda seperti ini.

Buat pada sisi satunya lagi dan lem seperti ini.

Sekerang siapkan modul trasmitter remot kontrolnya dan beri baterai.

Rangkai juga modul receiver pada bodi robot.

Lengkapi bodi robot sesuai desain dari wall-e seperti mata dan tangan. Kamu bisa lihat pada gif di bawah ini.

Cara membuat robot dari kardus sederhana yang mudah ini bisa kamu ajarkan pada anak-anak, selain merekan akan senang karena dapat membuat robot-robotan sederhana, merka juga akan teredukasi tanpa mereka sadari, keren bukan?.
Selain itu, robot wall-e ini juga bisa bergerak dengan remot kontrol, sehingga dapat dikendalikan dari jarak jauh, hal ini tentu saja akan menambah minat bagi anak-anak, bagi orang dewasa saja menarik hehe. Sekian tutorial cara membuat robot wall-e dari kardus ini, semoga bermanfaat, terimakasih.
sumber: https://tutorcaramembuat.blogspot.com/2019/03/cara-membuat-robot-wall-e-dari-kardus.html









































12. Membuat line follower robot sederhana tanpa pemrograman
Terkadang bagi seseorang yang ingin sekali membuat suatu robot sederhana tapi tidak mengetahui bahasa pemrograman baik mikrokontroler ataupun bahasa pemrograman yang lain akan sangat sulit sekali untuk melanjutkan niatnya. tapi saya akan membantu anda untuk melakukannya, anda tidak perlu repot-repot belajar mikrokontroler ataupun bahasa pemrograman yang lain anda sudah cukup mengetahui sedikit tentang elektronika dasar saja dan mengenai konsep digital, ya karena memang itu saja yang akan kita gunakan.
oke sebelum lanjut kelebih jauh lagi sebaiknya kita mengetahui terlebih dahulu apa sih line follower robot itu..?
line follower merupakan suatu robot sederhana yang bekerja mengikuti garis baik warna hitam maupun warna putih, ya dia akan terus bekerja selama ada garis itu saja intinya….!!

Seperti terlihat pada gambar diatas robot tersebut akan mengikuti kemana saja arah garis yang telah dibuat.
Oke langsung saja apa saja sih yang kita butuhkan untuk membuat robot sederhana tersebut?
1. siapkan motor DC 2buah
2. setingan gear box untuk conversi putaran motor DC tersebut
3. buatlah casing yang seringan mungkin dari bahan acrylic lebih baik pastikan pemasangan roda harus berbentuk segitiga sama sisi untuk kedua motor dan satu roda belakang yang dapat bergerak kesegala arah

atau teman teman bisa membelinya yang sudah siap rakit seperti gambar dibawah ini, akan lebih mempermudah teman-teman dalam membuatnya karena sudah dilengkapi roda motor+gearbox dan juga casis, teman-teman hanya tinggal merakitnya sendiri mudah dan cepat
4. Persiapkan komponen yang terdapat pada gambar berikut lalu buatlah PCB nya dan persiapkan arena atau jalur untuk robot tersebut bekerja
jika gambar komponen kurang jelaskan teman-teman dapat mendownloadnya melalui link berikut ini:
untuk rangkaian elektriknya RANGKAIAN ELEKTRIK UNLFR
untuk gambar Schematik di PCB nya Gambar elektriknya
Jangan lupa sensor terdiri dari LED Super Bridge warna putih dan LDR, dan diusahakan LDR diberikan selongsong berwarna hitam agar tidak terpengaruh cahaya lain dari luar, sehingga LDR dapat fokus untuk menangkap cahaya yang dipantulkan oleh LED Super Bridge ketika terkena jalur berwarna putih.
selamat mencoba dan teruslah berusaha jangan takut untuk gagal, jika mengalamai kesusahan silahkan menghubungi saya dan kalau ada yang menginginkan training untuk sekolah-sekolah dasar atau pun SMP dan SMA untuk mata pelajaran robotika ataupun elektronika dasar dapat menghubungi saya di 081514249963 mungkin juga untuk pembuatan dapat menghubungi saya juga selamat mencoba.
jika teman-teman tertarik dapat membuka link berikut ini
ini merupakan contoh yang sudah saya buat dan sudah teruji
dan ini videonya semoga bisa menambah inspirasi untuk anda dalam membuat
atau dengan mekanik yang lain
sumber: https://utakatikmikro.com/2010/06/18/membuat-line-follower-robot-sederhana-tanpa-pemrograman/
13. Membuat Robot Line Follower Analog
Pada kesempatan ini q mau share mengenai cara membuat robot line follower analog, apa sich maksudnya analog dan apa bedanya dengan digital…. robot line follower analog tidak perlu adanya pemrograman robot secara software (perangkat lunak) sedangkan Line Follower Mikrokontroler (digital) melibatkan software… itu sich cuman salah satu dasar perbedaannya, untuk perbedaan yang laen… apa ya… pokoknya itu dech, hehe… 🙂
Buat kamu-kamu yang baru saja tertarik pada dunia robot dan pengen banget membuat robot maka belajar lah dahulu dari yang dasar, nach membuat robot line follower analog merupakan dasar-dasar dari merancang robot… (q dulu belajarnya dari analog) tentu saja nanti berkembang menuju digital…
Apa saja sich komponen dasar dari sistem robot itu….? setau ku robot terdiri dari komponen input (masukkan, contohnya sensor), pengolah dan output (keluaran), nach sistem robot line follower analog belum lah kompleks jika dibandikan dengan robot seperti humanoid contoh ASIMO dari Honda… untuk dasar membuat robot kita gak perlu membuat robot asimo, hehe susah banget kali…., line follower analog juga dah bisa dikatakan robot, sebab dikatakan robot jika benda tersebut telah dapat begerak atw berjalan secara automatik tanpa bantuan operator.
Komponen dasar dari sistem robot:
hmmm tulis apa lagi ya…. langsung aja dech nich q share salah satu rangkaian dari robot line follower analog….

Rangkaian Line Follower Analog diatas terdapat 3 bagian utama, yaitu bagian sensor, komparator dan driver. Untuk bagian sensor digunakan photodioda sebagai sensor cahaya, sedangkan komparatornya menggunakan IC LM 324 sebagai pembanding tegangan dan untuk drivernya digunakan H- Bridge Transistor.
Cara kerja dari rangkaian-rangkaian Line Follower Analog tersebut adalah sebagai berikut :
A. Prinsip Kerja Sensor
Sensor yang digunakan terdiri dari photo dioda. Sensor ini nilai resistansinya akan berkurang bila terkena cahaya dan bekerja pada kondisi riverse bias. Untuk sensor cahayanya digunakan LED Superbright, komponen ini mempunyai cahaya yang sangat terang, sehingga cukup untuk mensuplai cahaya ke photo dioda.

Gambar Rangkaian sensor
Cara kerjanya :

Gambar Sensor tidak terkena cahaya
Jika photo dioda tidak terkena cahaya, maka nilai resistansinya akan besar atau dapat kita asumsikan tak hingga. Sehingga arus yang mengalir pada komparator sangat kecil atau dapat diasumsikan dengan logika 0.

Gambar Sensor terkena cahaya
Jika photo dioda terkena cahaya, maka photo dioda akan bersifat sebagai sumber tegangan dan nilai resistansinya akan menjadi kecil, sehingga akan ada arus yang mengalir ke komparator dan berlogika 1.
B. Prinsip Kerja Komparator
Komparator pada rangaian ini menggunakan IC LM 324 yang didalamnya berisi rangkaian Op Amp digunakan untuk membandingkan input dari sensor. Dimana input akan dibandingkan dari Op Amp IC LM 324 yang output berpulsa high. Sehingga tidak perlu adanya pull up pada outputnya. IC ini dapat bekerja pad range 3 volt sampai 30 volt dan dapat bekerja dengan normal mulai tegangan 6 volt.
Dalam rangkaian ini juga terdapat 4 LED, yang berfungsi sebagai indikator. Untuk mengatur tagangan pada pembanding, disambungkan Variable Resistor (VR) diantara kedua OP Amp IC LM 324. Untuk datasheet LM324 silakan unduh disini.

Gambar Rangkaian komparator
► Jika tidak ada arus yang mengalir dari rangkaian sensor ke rangkaian ini maka tegangan masukan untuk rangkaian ini adalah 0 Volt, akibatnya pada IC 1 tegangan di terminal ( + ) > ( – ), maka LED-A on, sedangkan pada IC 2 sebaliknya LED-B off.
► Jika ada arus yang mengalir dari rangkaian sensor ke rangkaian ini maka tegangan masukan untuk rangkaian ini mendekati Vcc, akibatnya pada IC 2 tegangan di terminal ( + ) < ( – ), maka LED-B on, sedangkan pada IC 1 sebaliknya maka LED-A off.
Kondisi antara titik A dan B akan selalu keterbalikan.
C. Prinsip Kerja Driver Motor
Driver adalah rangkaian yang tersusun dari transistor yang digunakan untuk menggerakkan motor DC. Dimana komponen utamanya adalah transistor yang dipasang sesuai karakteristiknya.

Gambar Rangkaian driver H-Bridge Transistor
Pada saat input A berlogika 1, maka ada arus yang mengalir pada rangkaian, akibatnya transistor 1 dan 4 on karena basis terbias, sehingga motor berputar. Sehingga saat input A berlogika 1 maka input B akan berlogika 0, jadi transistor 2 dan 3 akan off.
Pada saat input B berlogika 1, maka ada arus yang mengalir pada rangkaian, akibatnya transistor 2 dan 3 on karena basis terbias, sehingga motor berputar tapi dengan arah yang berlawanan.
Referensi : Politeknik Elektronika Negeri Surabaya, Pelatihan Line Tracer, ITS, 2006.
untuk lebih lengkap mengenai penjelasan rangkaian tersebut, kalian dapat memdownload makalah robot line follower analog disini…Selamat mencoba…
nach ni dia galery foto robot analog ku….(jadul tenan… tapi ini awal dari segalanya…)
nach ni dia kalo pengen liat video robotku klik disini…. dan disana…
===============================================================
bacaan terkait di blog ini:
1. merancang-rangkaian-sensor-garis klik disini
2. merancang-komparator-dengan-histerisis klik disini
14. Membuat Line Follower Robot Tanpa Mikrokontroler

Dari konsep sederhana yang pernah disampaikan pada artikel terdahulu, sebenarnya kita bisa mengaplikasikannya untuk membuat robot line follower tanpa menggunakan mikrokontroler sebagai prosesor/pemroses datanya. Penggunaan mikrokontroler sebenarnya selain untuk mempermudah pengendalian robot, juga digunakan untuk menangani kerumitan, operasi matematik/logika yang sulit dipecahkan, atau jumlah data yang harus diolah terlalu banyak, sehingga pemrosesan data sensor tidak terlalu effektif jika harus dilakukan oleh sejumlah rangkaian transistor ataupun op-amp.
Namun untuk sekedar memahami bagaimana robot line follower bekerja, artikel ini akan membahas bagaimana mengaplikasikan/membuat robot line follower tanpa mikrokontroler.
Sensor garis
Tidak ada perubahan dalam rangkaian sensor garis yang digunakan. Kita masih menggunakan efek pantulan cahaya dari LED yang ditangkap oleh photodioda kemudian sinyal ini diumpankan ke rangkaian op-amp.

Komparator
Rangkaian op-amp dikonfigurasikan sebagai komparator yang menghasilkan output logika “0” dan “1”. Level kepekaan sensor dapat diatur dengan menyesuaikan(memutar) nilai VR. Rangkaian sensor dibuat 2 buah saja. Rangkaian ini dilengkapi dengan indikator LED yang berfungsi sebagai penanda apakah sensor mendeteksi garis hitam atau tidak, namun untuk menghemat daya sebaiknya bagian ini dihilangkan saja. Rangkaian ini juga dibuat 2 buah.

Driver Motor
Konfigurasi paling sederhana yang dapat digunakan sebagai driver motor menggunakan kombinasi darlington D400 dan TIP41. Skema rangkaiannya tampak seperti berikut.
Uji coba
Setelah semua rangkaian disatukan, selanjutnya menguji robot kita. Robot akan berjalan mengikuti garis meskipun terkadang akan keluar garis sehingga kita perlu meletakkannya kembali ke tracknya. Jalannyapun terkesan kaku. Agar tidak terkesan kaku kita bisa memperbaiki jalannya robot dengan mengatur jarak sensor satu dengan sensor garis kedua, atau bisa dengan menyesuaikan lebar garis (track). Jumlah sensor yang hanya dua juga bisa menjadi penyebabnya, namun akan menjadi kesulitan tersendiri jika kita menambah jumlah sensornya, sebab semakin banyak sensor yang kita tambahkan, semakin banyak pula logika sensor yang harus diolah. Disinilah peranan mikrokontroler sangat dibutuhkan untuk mempermudah dalam pemrosesan logika sensor.
15. MEMBUAT ROBOT LINE FOLLOWER SEDERHANA
1. Pendahuluan
Secara sederhana, robot line follower adalah robot yang dapat bergerak mengikuti garis secara OTOMATIS! Sebenarnya, kalau pembaca googling, banyak sekali tutorial membuat robot line follower di internet, tapi hampir semuanya ribet dan menggunakan mikrokontroler yang belum dimengerti oleh bocah” smp dan sma yang banyak comment di postingan saya sebelumnya. Hehe.. 😀 Di bawah ini contoh robot line follower.
Nah..terlihat bukan di gambar ada sebuah ‘benda’ dengan roda yang dapat bergerak mengikuti garis / jalur berwarna hitam yang berbelok-belok. ‘Benda’ tersebut mengikuti garis dengan otomatis loh. Prinsip dasarnya, sama seperti manusia, mata digunakan untuk melihat, kaki/roda digunakan untuk berjalan, dan otak digunakan untuk berpikir. 3 Komponen utama pada setiap robot : mata, kaki, dan otak. Sama seperti penjelasan saya pada postingan sebelumnya, jangan pikirkan robot itu RIBET, pikirkan robot itu sederhana, jangan dulu mikir yang rumit-rumit, robot line follower yang sekarang akan saya tunjukkan adalah sesuatu yang SEDERHANA..! tanamkan kata” sederhana pada pikiran pembaca sebelum memulai. 😀
Okeh..satu gambar lagi sebelum kita memulai tutorialnya.. 😀 Gambar di bawah ini adalah salah satu contoh track yang digunakan untuk lomba Line Follower Robot. Track yang cukup unik bukan? Sekarang udah kebayang kan robot yang mau dibuat seperti apa?
2. Sensor (Rangkaian Photo Dioda)
Sensor dapat dianalogikan sebagai ‘mata’ dari sebuah robot. Mata di sini digunakan untuk ‘membaca’ garis hitam dari track robot. Kapan dia akan berbelok ke kanan, kapan dia berbelok ke kiri. Semua berawal dari mata bukan? Kita sebagai manusia tahu arah kita berjalan karena kita memiliki mata. Yaah, sama seperti robot.
Pada robot line follower, sensor robot yang dapat digunakan ada 3 jenis, yaitu LDR (Light Dependent Resistor), Photo Dioda, dan Photo Transistor. Saya tidak akan menjelaskan satu” secara detail, di sini kita gunakan photo dioda sebagai sensor robot. Kalau yang masih penasaran dengan sensor lainnya, silahkan tanya om google saja. 😛
Nah..gambar di atas adalah 1 pasang sensor yang akan kita gunakan pada robot line follower. Bentuknya mirip seperti LED, yang berwarna ungu bernama receiver (photo dioda) dan yang berwarna bening bernama transmitter (infrared). Kalau pembaca ingin membeli di toko elektronik, bilang saja 1 pasang infrared sensor. Untuk membuat robot ini, kita gunakan 4 pasang sensor . Sip? Murah koQ, satu pasangnya 3 ribu rupiah..hehe.. 😀
Kemudian, setelah kita mengetahui sensor apa yang akan kita pakai, coba buat dulu rangkaian seperti di bawah ini untuk setiap 1 pasang sensor :

Nah, untuk 4 pasang sensor..kita perlu membuat 4 rangkaian seperti di atas. Cara kerjanya cukup sederhana, hanya berdasarkan pembagi tegangan. Penjelasan di paragraf berikutnya aja yaa..hehe.. 😀 Lambang LED yang berwarna hitam adalah transmitter atau infrarednya yang memancarkan cahaya infrared terus menerus jika disusun seperti rangkaian di atas. Lambang LED yang kanan adalah receiver atau photo dioda-nya yang menangkap cahaya infrared yang ada di dekatnya. INGAT masang photo dioda-nya HARUS terbalik, seperti gambar rangkaian di atas. Dari rangkaian sensor ini, kita ambil OUTPUT (to comparator, A/D converter, dll) yang ditunjukkan oleh gambar di atas.
3. Sensor (Cara Kerja)
Sekarang pertanyaannya, koQ lucu yaa sensor CUPU kaya gitu bisa baca garis? 😛 Cara kerjanya ditunjukkan oleh gambar di bawah ini. 😀

Ketika transmitter (infrared) memancarkan cahaya ke bidang berwarna putih, cahaya akan dipantulkan hampir semuanya oleh bidang berwarna putih tersebut. Sebaliknya, ketika transmitter memancarkan cahaya ke bidang berwarna gelap atau hitam, maka cahaya akan banyak diserap oleh bidang gelap tersebut, sehingga cahaya yang sampai ke receiver tinggal sedikit. Nah, artinya kita sudah bisa membedakan pembacaan garis dari sensor bukan? Kalau kita sudah tahu, perbedaan cahaya yang diterima oleh receiver akan menyebabkan hambatan yang berbeda-beda di dalam receiver (photo dioda) tersebut. Ilustrasinya seperti gambar di bawah ini.
Kalau cahaya yang dipancarkan ke bidang putih, sensor akan :

Sebaliknya, kalau cahaya yang dipantulkan oleh bidang hitam, maka sensor akan :

Setelah kita tahu ilustrasi sensor, tinjau kembali rangkaian sensornya, bisa kita analogikan seperti :

Tadi kita tahu kalau hambatan receiver berubah-ubah, jadi otomatis rangkaian sensor yang bagian kanan bisa kita analogikan seperti gambar. Receiver bisa kita analogikan dengan resistor variabel, yaitu resistor yang nilai hambatannya bisa berubah. Otomatis, dengan pembagi tegangan, nilai tegangan di output rangkaian juga akan berubah-ubah bukan? Jadi, baca putih akan mengeluarkan output dengan tegangan rendah (sekitar 0 Volt) dan baca hitam akan mengeluarkan output dengan tegangan tinggi (mendekati Vcc = 5 Volt). Kalau rangkaian sensor pembaca sudah jadi, bisa dibandingkan dengan punya saya yang ditunjukkan oleh gambar di bawah ini. 😀

4. Processor (Pendahuluan)
Processor yang kita gunakan di sini bukanlah processor” canggih seperti intel dan amd. 😛 Bahkan, kita sama sekali TIDAK menggunakan mikrokontroler, karena saya anggap mikrokontroler cukup rumit untuk ukuran smp dan sma. Dalam hal ini, kita gunakan 2 IC (integrated circuit) saja, yaitu 1 buah LM339 (Komparator) dan 1 buah 74LS00 (NAND gate). Simple bukan? 😀 Di bawah ini gambar kedua IC tersebut :
5. Processor (IC LM339)
IC LM339 biasa disebut sebagai komparator. Yah, dari istilahnya saja sudah ketahuan kalau gunanya adalah untuk meng-compare (membandingkan). Dengan kata lain, sesuatu yang berbentuk analog harus dikonversi dulu ke dalam bentuk digital (deretan biner) pada dunia elektronika. Hal ini bertujuan untuk mempermudah processing. 😀 Gambar di bawah ini adalah datasheet LM339. Coba perhatikan dulu sebentar 😛

Nah, 1 IC LM339 terdiri dari 4 buah komparator (yang berbentuk segitiga :P). Knapa kita hanya gunakan 1 buah IC ini? Soalnya kita juga hanya menggunakan 4 buah sensor. Kemudian, tinjau bagian komparator yang di sebelah kanan.
Satu buah komparator terdiri dari 2 input, yaitu Vin (input masukan dari sensor) dan Vref (tegangan referensi). Pada dasarnya, jika tegangan Vin lebih besar dari Vref, maka Vo akan mengeluarkan logika 1 yang berarti 5 Volt atau setara dengan Vcc. Sebaliknya, jika tegangan Vin lebih kecil dari Vref, maka output Vo akan mengeluarkan logika 0 yang berarti 0 Volt. Knapa kita bisa membandingkan seperti ini? Nah, seperti yang sudah saya bahas di poin sensor, sensor akan menghasilkan tegangan yang berbeda-beda ketika dia membaca bidang putih atau hitam kan? 😀
Kemudian, jangan lupa untuk menambahkan resistor pull-up di keluaran komparator (Vo). Hal ini disebabkan oleh perilaku IC LM339 yang hanya menghasilkan logika 0 dan Z (bukan logika 1), sehingga si logika Z ini harus kita tarik ke Vcc dengan resistor pull-up agar menghasilkan logika 1. Sip? 😀
Setelah digabung dengan sensor, ilustrasi rangkaian menjadi seperti ini.

6. Processor (IC 74LS00)
IC 74LS00 merupakan “NAND gate” yang berguna dalam teknologi digital. NAND gate terkait dengan logika 0 dan 1 serta merupakan gate yang paling simple dan bisa merepresentasikan semua jenis gate yang ada. Saya rasa bocah smp atau sma blom bisa memahami bagian ini. Jadi saya skip saja.. 😀 Di bawah ini adalah datasheet IC 74LS00.

7. Processor (Motor)
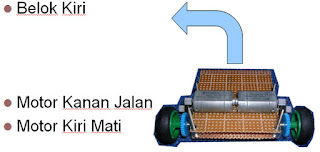
Sekarang kita tinjau, bagaimana cara motor bekerja ketika robot berbelok ke kiri dan ke kanan. Lihat ilustrasi di bawah ini ketika robot akan berbelok ke arah kanan.

Kemudian, lihat ilustrasi di bawah ini ketika robot akan berbelok ke arah kiri.

Nah..Ketika robot bergerak lurus, motor akan menyala dua”nya.

8. Processor (Transistor)
Nah..Sekarang knapa tiba” muncul transistor?! 😛
Jawabannya cukup simple. Output dari IC NAND tidak mungkin kuat untuk mendrive transistor. Kalau saya tidak salah, output IC hanya sekitar 2 V. Jadi, kita membutuhkan sambungan langsung motor ke baterai untuk menggerakkannya. Knapa kita pakai transistor? Ada yang tahu apa guna transistor? 😀
Transistor dapat berfungsi sebagai saklar / switch on off. Motor tidak menyala terus menerus bukan? Sudah saya jelaskan di bab sebelumnya, pada jalur tertentu motor akan mati dan menyala. Nah,, nyala mati motor tersebut diatur oleh transistor. Transistor yang digunakan di sini adalah NPN. Pada dunia elektronika, transistor terdiri dari dua jenis, yaitu PNP dan NPN. Berikut ilustrasi gampangnya terkait dengan motor.
Jadi, sejauh ini kita punya rangkaian lengkap seperti di bawah ini.

9. Mekanik
Hmm..
sebenarnya,,jujur saja saya kurang mengerti bagian mekanik. Soalnya saya bukan orang mesin..hehe.. 😀 Saya cuma tahu sedikit tips, yaitu buat gear yang besar” agar torsi-nya besar. Jadi, robotnya bisa berbelok dengan kuat. Kalau torsi kecil, robot akan sulit untuk berbelok. Gampangnya gitu aja..hehe.. 😛
10. PCB Layout
Berikut ini pcb layout dari sensor robot line follower, terdiri dari 4 sensor. Layout PCB ini dibuat dengan menggunakan software eagle.

Di bawah ini layout pcb dari rangkaian processor, yang terdiri dari 1 IC NAND dan 1 IC komparator.

yang jadinya akan seperti gambar di bawah ini
oke..sekian tulisan saya tentang membuat robot line follower sederhana. Kalau ada pembaca yang ingin bertanya silahkan.. Saya akan menjawab dengan senang hati..hehe.. 😀 sampai jumpah di tulisan robot saya lainnya.. 😛
sumber: https://pentriloquist.wordpress.com/2009/01/09/membuat-robot-line-follower-sederhana/
Artikel Lainnya:
Tidak ada komentar:
Posting Komentar